Now we’re talking!
This mean little beast is heavy, powerful, and insanely nimble. I’m so stoked with this build! You can rarely put things together and have a smooth experience. This one was surprisingly easy to do.

Parts list:
- Furitek Angry Sparrow frame
- Furitek Python ESC, Cedar Motor, and GT5 integration
- 2x Meus Racing Isokinetic front axles
- 2x NSDRC RS100 Limited Edition Red steering servos
- Injora brass beadlock gold wheels -4.7mm offset
- Injora S5 Swamp Claw tires
- Injora 52mm big bore shocks
- Meus Racing AX24 driveshafts
- Injora AX24 Links (used in the front)
- Injora Deadbolt Links (used in rear)
My favorite SCX24 parts
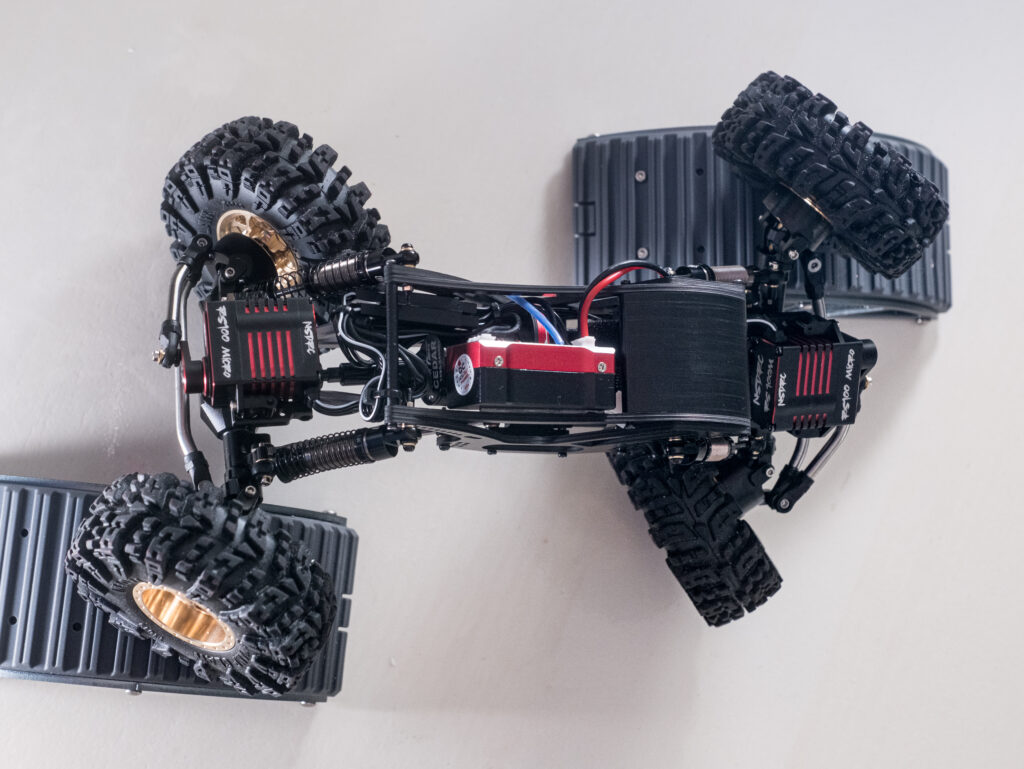
The Furitek Cedar motor is incredible! It is so quiet and capable, and turning the NSDRC servos at 8.4v is no problem. It makes me second-guess every motor I have, wanting to replace it with this. It is now connected to a stock Axial transmission because I want a failure point. In time, it will receive a metal transmission.
Meus knocked it out of the park with these axles. I don’t think I’ll ever purchase a different kind unless some specific build can’t use them. They are heavy, in a good way. They also come with every part and screw you could need. The way the servo mounts are set up provides so much flexibility. My first mounting of the front servo knocked against the top of the Angry Sparrow frame. It was fairly simple to readjust the servo to a more forward position, giving it total freedom in articulation. Aside from the weight and adjustability, the amount of turning angle is insane! I had to detune the turning angle over 10% in the transmitter to stop the rub on the shocks.
The NSDRc RS100 servos are incredibly powerful. Not only are they turning these heavy axles to extreme angles, these wheels are not light either. The tires are super sticky, too! The first run was on a velour couch where the sticky Swamp Kings were stuck to the couch material, and the servos did not miss a beat. All the weight is low, and probably 85% is on the axles and rotating mass. This build weighs 546.6 grams… 1.2 lbs.
Those are the top 3 favorites, but I cannot forget the ESC.
This Furitek Python RCGT5 ESC is so convenient. I try to run the FlySky GT5 transmitter with all my builds. Not having to use a separate receiver saves space, which is critical in this little chassis. On top of that, you get the Furitek Bluetooth connection to the phone, which makes tuning the motor so easy. In a later article, I will post my tuning setup for both this rig and the GX470.



Getting the FlySky GT5 setup was the most frustrating—frustrating is a strong word here—but it wasn’t obnoxious. I had to run through the binding process five times before it wasn’t necessary. The GT5 is new to me, so maybe I’m doing something wrong. However, all the settings were kept within those five binding connections. Hopefully, the bond is super strong now!
The GT5 allowed me to tune the steering angles on both Meus axles. It is not abnormal for any transmitter to do this on the front axle, but it is imperative for a dual steer rig with two front axles. A standard Axial transmitter would not have cut it here. And that is the case, too, with the AX24 transmitter. Then there is the type of steering. You can plug the rear servo into the Channel 4 slot on the Python. I tried that first. Unfortunately, this only gives you three steering angles, as the GT5 is limited to three positions on Channel 4. I could not get it to do anything else, but I didn’t give it a lot of experimentation.
Flipping the rear axle to Channel 3 immediately unleashed the GT5’s crawl functions, which was a big goal. Plugged into the Python on Channel 3, you can choose all the usual multiple steering options: crab, 4-way, single axle, etc. I may play with Channel 4 more in time, but I’m enjoying the overall build right now.

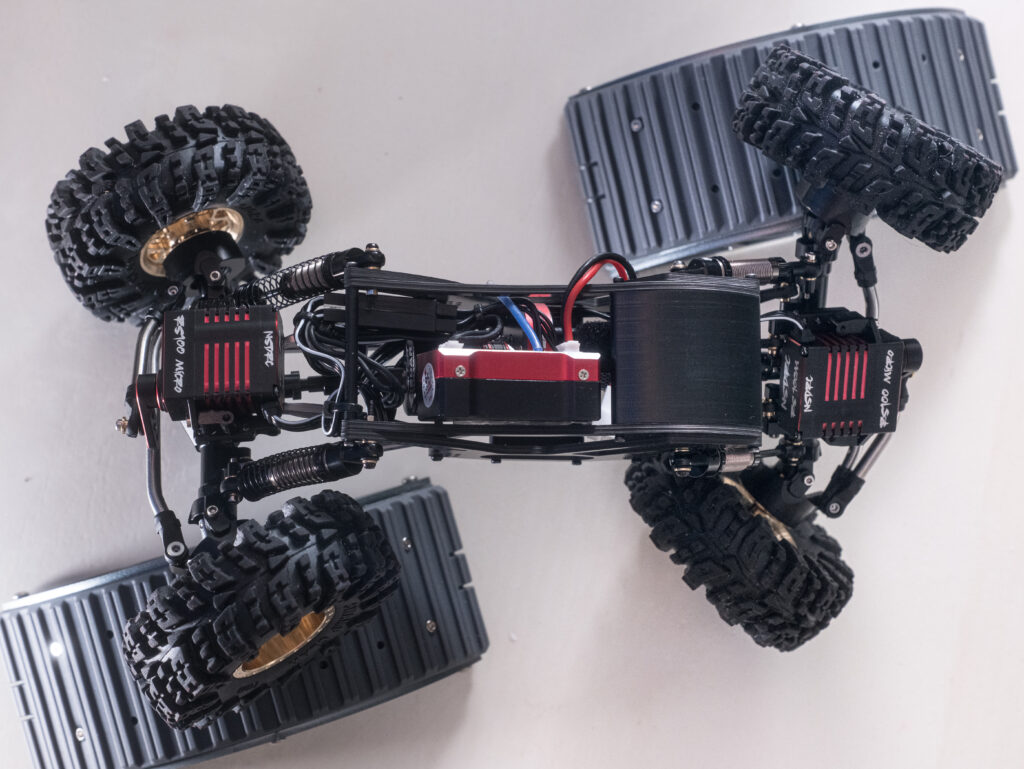
Carbon Fiber Angry Sparrow Frame
The elephant in the room is the Furitek Angry Sparrow frame. It allows a lot of flexibility in links and shock placement. I got lucky and didn’t have to play with shock placement too much. Let’s bet I will after some outdoor crawls. The indoor course (it is winter in Vermont right now) is well-known. I can eyeball where things should be.
The frame was very easy to assemble. I was surprised to see how small it was in the box, and upon opening, I was a little concerned it might be too small. Fortunately, the Furitek Python + Cedar motor combo made placement much easier. If that motor spun, this would be a whole different story.
Zip-ties were the order of the day with this frame. I did do the lighter+pencil twirl on the servo wires, but that didn’t solve anything in this rig. Too many turning pieces on the axle made any loose wires a problem. Save yourself a few minutes and reserve your Angry Sparrow build to zip ties.

What links should you use with the Angry Sparrow?
I tried a few different combos and am probably not done. I would use longer links if I had a Gladiator or Deadbolt drive shaft. Because I only had AX24 drive shafts, I used an odd combo of the Deadbolt links in the rear. Shout out to Cape Crawler on YouTube for suggesting the Deadbolt links. Having the front Ax24 links with something longer in the back is the way to go.



My only wish for this rig is a bigger battery slot. I may figure something out in time.







